Радиолокация
Что такое радиолокация
Локация - определение местоположения объекта. В зависимости от вида используемых сигналов различают её виды:
оптическая локация, тепловая локация, звуковая локация, гидролокация и, собственно, радиолокация.
Также радиолокация может быть определена как - научно-техническая дисциплина, занимается изучением и созданием устройств и методов, предназначенных для получения данных об объектах и местности с помощью радиоволн. Близким и частично пересекающимся термином является радионавигация - научно-техническая дисциплина, занимающаяся изучением и созданием радиотехнических средств и методов навигации при вождении движущихся объектов.
Если для локации используется какой то прибор, то он будет называться локатором, с соответствующей приставкой (эхолокатор, гидролокатор и т.д.).
В зависимости от того принимает локатор собственный сигнал объекта или излучаемый самим локатором зондирующий, локация может именоваться пассивной и активной.
И в соответствии с этим правилом выделяют 2 типа радиолокации:
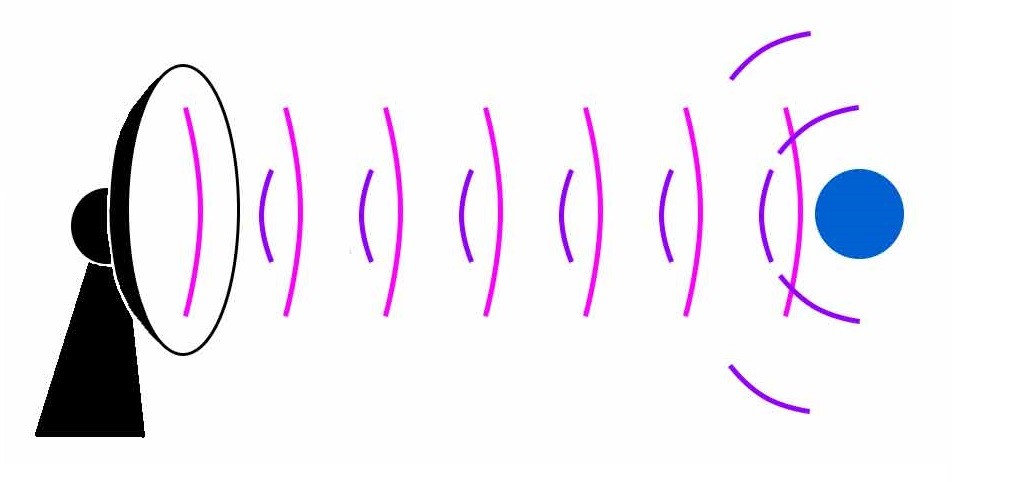
Пассивная радиолокация, или пассивный метод радиолокационного наблюдения. Она основана на приёме собственного излучения объекта или излучения отраженного объектом от другого источника. Такие системы имеют в своём составе только приемные устройства и не создают зондирующего сигнала, по этой причине они наиболее помехоустойчивы в сравнении с другими видами.
Изначальный сигнал Отраженный от объекта сигнал Отражающий объект
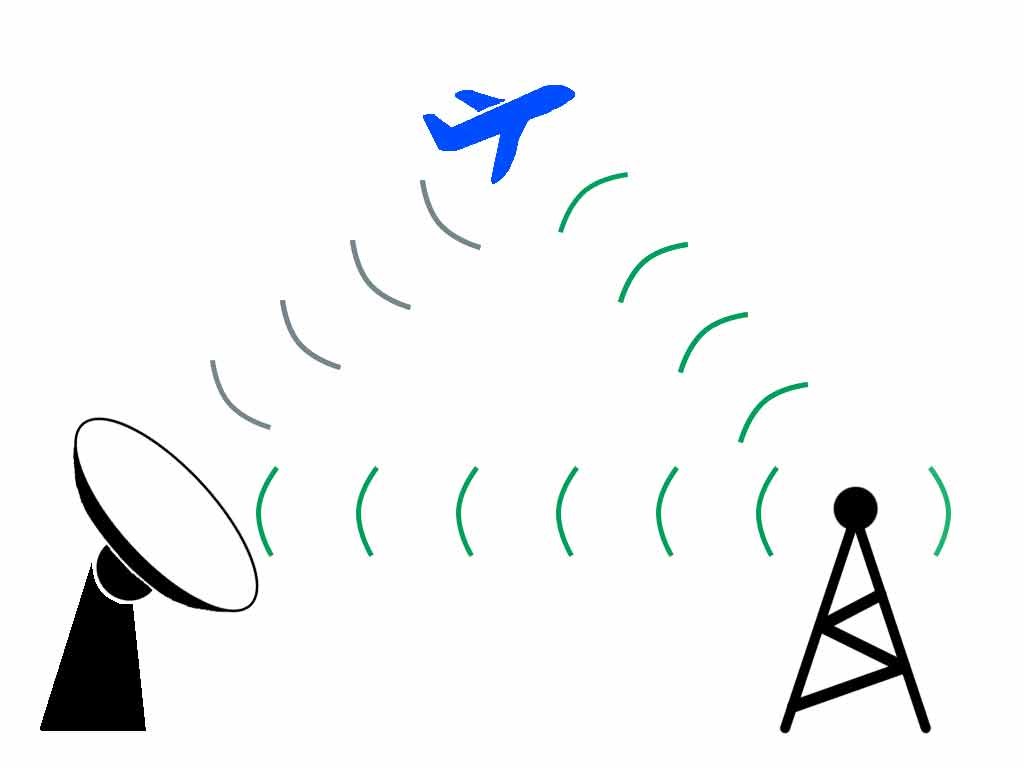
Активная. Используется для обнаружения или отслеживания объектов которые сами не являются источником радиосигнала. При этом методе радар сам излучает запросный или зондирующий сигнал, и после принимает ответный.
Также активная радиолокация имеет 2 вида:
С активным ответом. При ней предполагается наличие на объекте радиопередатчика ответчика, который излучает радиоволны в ответ на запросный сигнал. Применяется, например, при дистанционном радиоуправлении или при опознании свой-чужой. Также ответный сигнал может содержать дополнительную информацию (тип объекта, оставшееся количество топлива и т.д.)
С пассивным ответом. В данном методе радар излучает зондирующий сигнал и принимает его после отражения от цели в качестве ответного. Характеристики объекта определяются в зависимости от параметров принятого после отражения сигнала.
Зондирующий сигнал Ответный сигнал Отражающий объект
Ещё в 1897 г. во время опытов по радиосвязи между кораблями «Европа» и «Африка» на Балтийском море Александр Степанович Попов зарегистрировал влияние на уровень принимаемого сигнала, оказываемое кораблем, пересекающим радиотрассу. В будущем это явление было использовано в радиолокационных системах, работающих «на просвет» и применяемых, например, для охраны входа в гавань.
Затем в 1922 г. американские военные инженеры проводили опыты по радиосвязи через реку Потомак, в это время по реке прошел корабль, и связь прервалась, точно также как и в случае зафиксированном А. С. Поповым, что натолкнуло на мысль о применении радиоволн для обнаружения движущихся объектов путем интерференции незатухающих колебаний.
Александр Степанович Попов 1859 г. - 1905 г.
Первые радиолокаторы
Радиолокатор или же РЛС (Радиолокационная станция), он же радар (radio detection and ranging), это - радиолокационная система, используемая для обнаружения положения объектов и получения данных о них. Английский термин появился в 1941 году, и со временем перешёл в разряд отдельного слова.

Пример РЛС
Первый патент на радиолокатор получил немец Кристиан Хюльсмайер. Ознакомившись с открытием Генриха Герца о том, что электромагнитные волны отражаются от металлических поверхностей, Хэльсмайер сосредоточил свое внимание на системе, которая бы использовала данное явление для предотвращения столкновений кораблей, в 1902 году он успешно провел испытания своего метода на реке Рейн, а в 1904 году получил патент на своё устройство.
Устройство, получившее название "телемобилоскоп", в отличии от современных радаров не было способно на прямую определять расстояние до цели, но вполне справлялось с определением присутствия отдаленных объектов, таких как те же корабли.
Кристиан Хюльсмайер 1881 г. - 1957 г.

Реплика телемобилоскопа из музея в Мюнхене
Несмотря на существование радиолокатора, в целом, технология долгое время не находила активного применения. Первые же практические результаты в радиолокации были получены разными странами практически в одно время - в первой половине 1930-ых годов. Серьезным стимулом для изучения технологии стало развитие авиации в то же время.
Первые радиолокаторы в СССР
В СССР в 1930 году советские ученые Леонид Мандельштам и Николай Папалекси разработали теорию измерения расстояний с помощью интерференции волн. Затем, в 1934, инженеры из исследовательской групп под руководством П. К. Ощепкова и Б. К. Шембеля с использованием разработанной ими экспериментальной установки "Рапид" впервые в СССР экспериментально доказали практическую возможность радиообнаружения самолета с помощью отраженной от него электромагнитной волны.

Павел Кондратьевич Ощепков 1908 г. - 1992 г.
Борис Константинович Шембель 1900 г. - 1987 г.
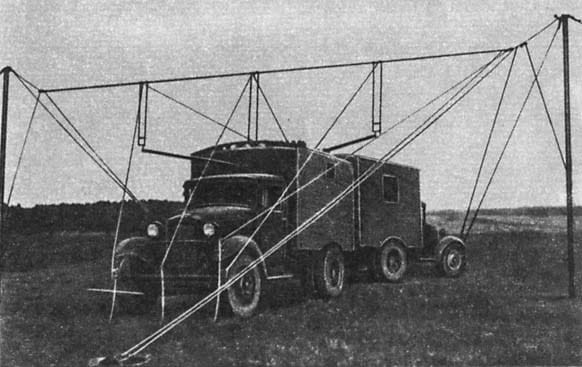
После незапланированной приостановки в исследованиях, причиной которой был арест Ощепкова в 1937 по обвинению в контрреволюционной деятельности в связи с "делом Чухачевского", через год на основе идей П. К. Ощепкова была разработана опытная установка «Ревень», в последствии послужившая прототипом для первой в мире серийной РЛС РУС-1 (радиоулавливатель самолетов) принятой на вооружение СССР в 1939 году, а уже через год на вооружение поступила РЛС РУС-2, которая использовала раздельные директорные антенны (приемную и передающую) расположенные на кабинах машин. Её модификация "Редут", имевшая вращающиеся антенны, широко применялась во время Великой Отечественной войны.
РЛС РУС-1
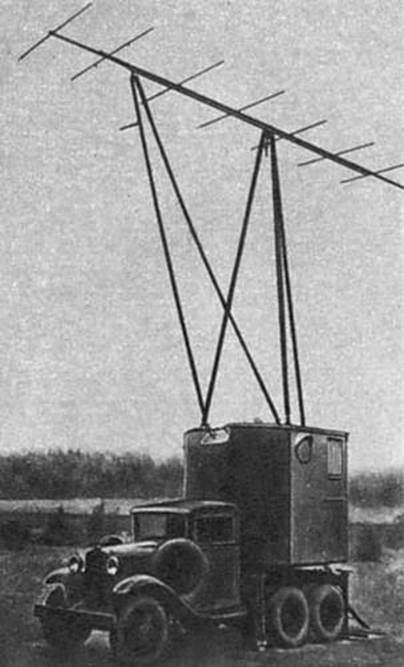

РЛС РУС-2 и "Редут"
Первые радиолокаторы в Великобритании
В Великобритании же исследованиями и разработкой технологии руководил Роберт Ватсон-Ватт, показавший в 1935 году первую успешную демонстрацию своего устройства. Во второй половине 1930-х стали появляться первые промышленные устройства, создавались опытные образцы радиолокаторов для размещения на самолётах, и в 1940 году было полностью завершено строительство сети мачт РЛС дальнего обнаружения «Chain Home» или AMES (Air Ministry Experemental Station) Tipe 1, расположенных вдоль побережья Британских островов. Позднее сеть была дополнена второй локаторов для обнаружения низколетящих самолетов Chain Home Low, она же же AMES Tipe 2.

Роберт Ватсон-Ватт 1892 г. - 1973 г.
Передающая антенна состояла из неподвижных горизонтальных вибраторов и рефлекторов, установленных на мачте высотой 115 м. Приемные антенны, размещавшиеся на вышках высотой 80 м, состояли из двух скрещённых вибраторов для определения азимута и двух вибраторов расположенных на разной высоте для определения высоты полета самолета по углу движения отраженного сигнала.

Башня Chain Home в Грейт-Бэддоу, Челмсфорд
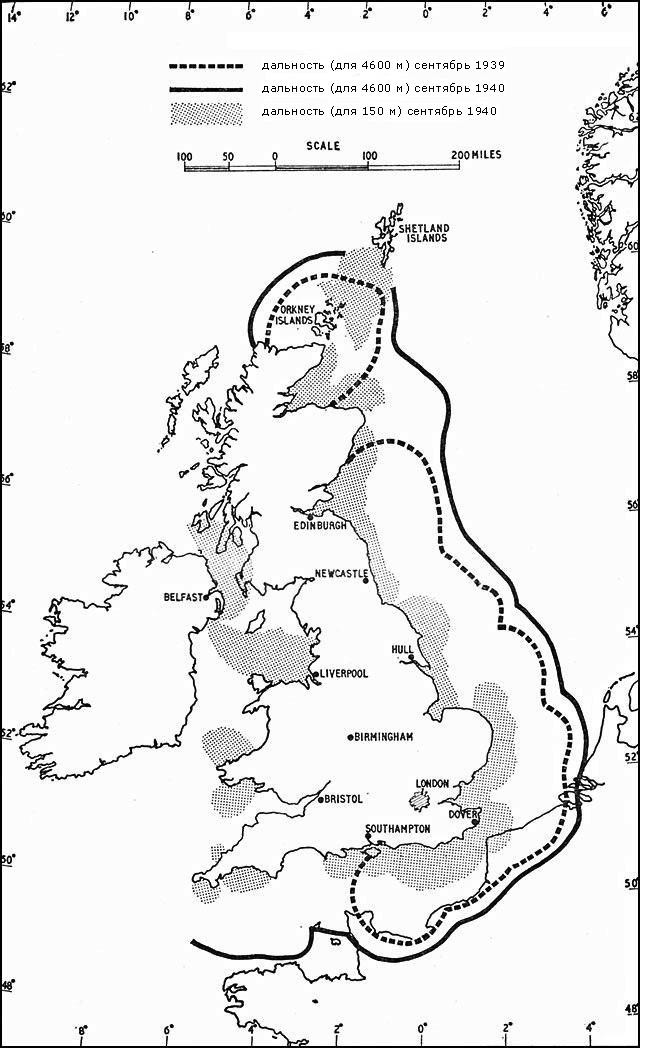
Карта покрытия сети Chain Home
Первые радиолокаторы в Германии
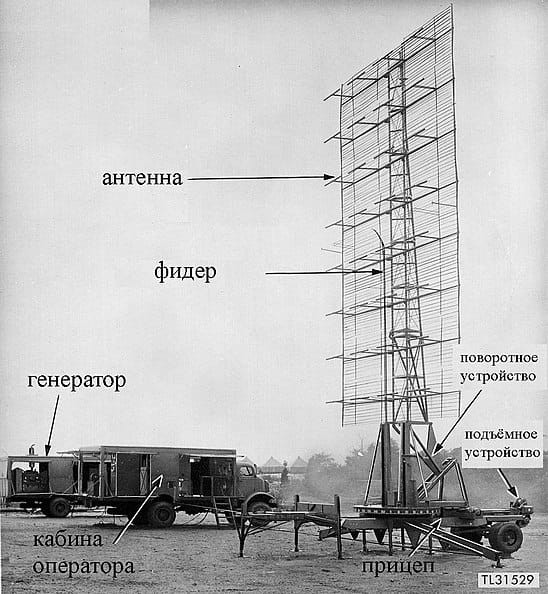
В это время в Германии, уже на тот момент имевшей развитую радиотехническую промышленность, под руководством Ханса Хольмана (1899 г. - 1960 г.), были разработаны и уже в 1937 году созданы РЛС «Freya» и «Seetakt». Они интересны тем, что использовали в качестве антенных устройств синфазные решетки вибраторных антенн, а также в них были применены магнетроны, что позволило повысить мощность, частоту излучения и увеличить дальность действия установок.
Перед началом Второй мировой войны Хольман эмигрировал в США и во многом способствовал развитию американских РЛС.
Также во время войны (в 1942 году) в Германии впервые в мировой истории были построены и поставлены на вооружение РЛС с зеркальными параболическими антеннами, как стационарными, так и возимыми. И также впервые в истории в том же году была построена РЛС дальнего действия использующая ФАР (фазированную антенную решетку) с электрическим сканированием диаграммы направленности, получившая название «Mammut» (Мамонт). Стоит отметить, что параметры этих радаров смотрятся неплохо даже в сравнении с современными РЛС.
К концу войны Германия, параллельно Великобритании, закончила разработку своих авиационных бортовых радиолокаторов.
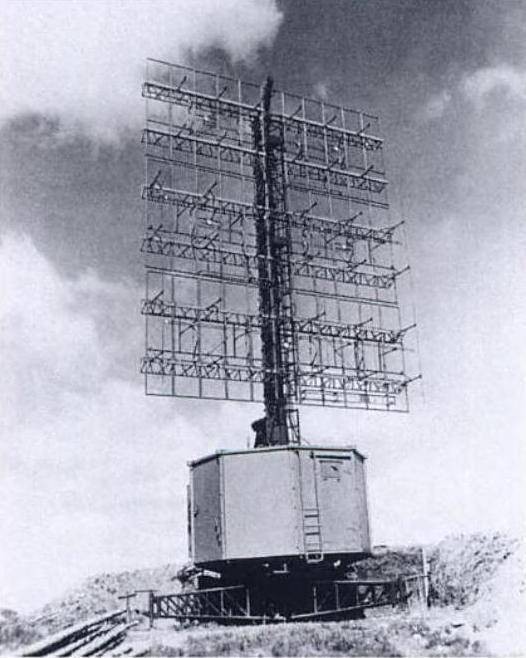
"Freya"
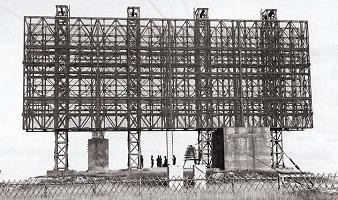
"Mammut"
Первые радиолокаторы в США
В США разработкой РЛС руководили Б. Тревор, П. Картер и Р. Пейдж. Начиная с 1936 года строятся тестовые образцы, среди которых корабельная РЛС под названием «RADAR». Это оказавшиеся очень удобным название в последствии было решено использовать для всех американских радиолокаторов, а уже в будущем оно распространилось и на другие страны, по итогу став отдельным словом.
Первый контракт американских военных с промышленностью был заключен в 1939 году, когда не без помощи Ханса Хольмана было освоено производство РЛС с синфазными вибраторными антенными решетками, был выпущен первый серийный военный радиолокатор SCR-268 (Signal Corps Radio №268). Со временем, к 1941 году, все военные базы США были оснащены крайне эффективными, по меркам того времени, радарами SCR-270 и SCR-271. В том числе и ставший печально известным pearl Harbor, тогда операторы РЛС успешно обнаружили групповую цель и доложили в информационный центр, но дежурный офицер проигнорировал данное сообщение, поскольку никто на деле не ожидал нападения, а ранее в процессе наладки уже случались ложные тревоги.
SCR-268

Мобильная версия SCR-270 и вышка SCR-271
Первые радиолокаторы в Японии
В Японии развитие технологии РЛС отставало от других стран на 3-4 года. Военные структуры Японии, частично в силу традиционности и консерватизма, долгое время не проявляли почти никакого интереса к технологиям связанным с радиоволнами, особенно к радиолокации, из за чего, несмотря на технический потенциал и на разработки японского профессора и исследователя Хидэцугу Яги, который изобрел антенны типа волновой канал. Даже была ситуация, когда японцы захватили английский радар, они даже не знали, что на нем установлено японское изобретение, собственно антенны Яги. Такая тенденция продолжалась бы ещё дольше, если не было подписано "японо-немецкое соглашение по обороне от коммунизма".
В 1940 году делегация японских офицеров ВМФ посетила Германию, где им продемонстрировали образцы немецких и английских радиолокаторов и рассказали некоторые особенности их работы. Руководитель делегации Йоджиро Ито, понимая насколько Япония безнадежно отстала в области радиолокации, немедленно послал эту информацию своим, после чего незамедлительно начались разработки в этой области, которые не отличались особыми успехами и первый рабочий экземпляр был создан в 1941 году, за несколько дней до вступления Японии в войну. Потому первые японские радиолокаторы в принципе основывались на локаторах других стран, а их производство было бессистемным. Например, tachi-1 и tachi-2 были созданы на базе американского радара SCR-268 и собраны в количестве по 25 штук каждый, а tachi-3 на базе трофейного английского GL M-k-II и их было выпущено всего 150 штук.
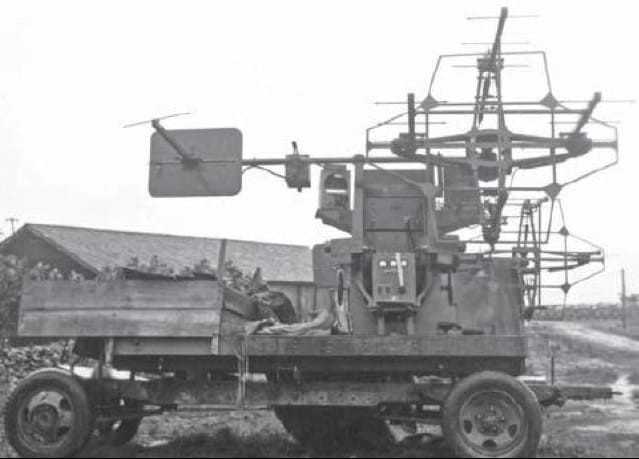

Tachi-1 и tachi-2

Передающая антенна tachi-3
Современные радиолокаторы
После войны развитие технологии продолжилось, логическим улучшением являлось увеличение дальности действия. В 1946 году советский ученый-радиотехник Николай Кабанов предложил идею обнаружения самолётов на удалении до 3000 километров путём отражения зондирующих лучей от ионосферы, некоторое время он занимался разработкой ЗГРЛС (загоризонтная радиолокационная станция) в рамках исследовательского проекта "Веер" и в 1948 году он впервые смог принять сигнал после отражения от земли. Установка, расположенная в Мытищах, работала и даже позволяла отслеживать берег Турции, однако заявленной дальности на тот момент достичь не удалось, а некоторые ученые посчитали, что это принципиально не возможно, потому проект "Веер" был закрыт в 1950 году.

Николай Иванович Кабанов 1912 г. - 1984 г.
Также исследования в этой области проводились в США под руководством Уильяма Дж. Талера (1925 г. - 2005 г.), в рамках проекта "TeePee" (от "Thaler Project") были созданы экспериментальные системы MUSIC (Multiple Storage, Integration, and Correlation) и MADRE (Magnetic-Drum Radar Equipment), которая смогла в 1961 году зафиксировать самолёты на расстоянии до 3000 километров.
Тем временем в СССР проводился научно исследовательский проект "Дуга-1", которым с 1958 по 1961 год руководил Ефим Семёнович Штырен и который оставался секретным вплоть до середины 1980-х годов. В рамках проекта было построено как минимум 3 использующие ФАР станции: "Дуга-Н" возле Николаева, "Дуга № 1" в районе чернобыля и третий объект находился в пос. Большая Картель. На данный момент сохранилась только одна станция (Чернобыль 2),

Комплекс антенн РЛС "Дуга" в городе Чернобыль 2
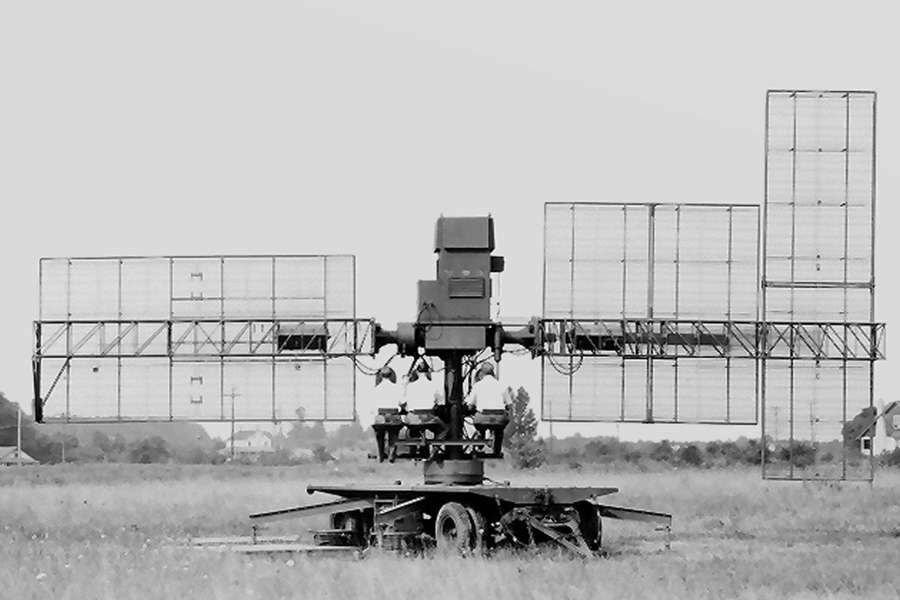
В наше время радары с ФАР особенно широко стали применяться, в силу их высоких характеристик и способности обнаруживать низко летящие цели, что сейчас стало распространено, поскольку у современных ПВО по сути нет ограничения по высоте на которой можно сбивать ракеты и самолёты. В активной ФАР, сокращенно называемой АФАР, также могут регулироваться направление излучения и форма диаграммы направленности путём изменения распределения токов или полей возбуждения на отдельных элементах, хотя они расходуют больше энергии и имеют большую стоимость.

Современная передвижная РЛС с ФАР
Бортовые РЛС
Также после войны продолжалась и разработка РЛС для размещения на самолётах, стимулом к их развитию было появление реактивной авиации и сейчас авиационные БРЛС (бортовые радиолокационные станции) неотъемлемая частью как военной, так и гражданской авиации. Они отличаются особо высокой технической сложностью и большой стоимостью, что связано с несколько противоречивыми требованиями к техническим характеристикам, поскольку такие радиолокаторы должны иметь минимальные вес и габариты при высокой надёжности в условиях перепадов давления и температуры.

Пример современной БРЛС
Обычно БРЛС нужны для упрощения пилотирования самолётов, хотя в наше время бывает и обратная ситуация, когда самолёт нужен для того, чтобы поднять на большую высоту радар. Как пример к таким самолётам-радарам относятся А-100 и Boeing E-3G.

А-100

Boeing E-3G
Кирилл, достойная статья. Большие труды. Ты Большой молодец.